Nos testes todos os motores e aquecedores da Impressora funcionaram
Segue os videos
Os videos do dia 06 não estão processando
Nos testes todos os motores e aquecedores da Impressora funcionaram
Segue os videos
Os videos do dia 06 não estão processando
Consegui a ajuda de Ari para achar um rolamento para a cama da Impressora.
Professor Paulo achou a peça para mover a correia dentada.
O projeto está parado pois preciso das peças que estão com Jorge.
Sem o motor e os drivers não posso fazer os testes.
WorkShop sobre Design Thinking


Como meu Pai não encontrou os motores. Aceitamos o desafio do professor e mudamos o projeto para a Impressora 3D.
Nesses três dias estamos encontrando as peças e arrumando o que encontramos até agora.




Tudo montado seguindo tutorial passado por Lucas.
A maior dificuldade é que a Impressora foi completamente desmontada para os projetos de outros alunos. Muitas peças estão em outros lugares.
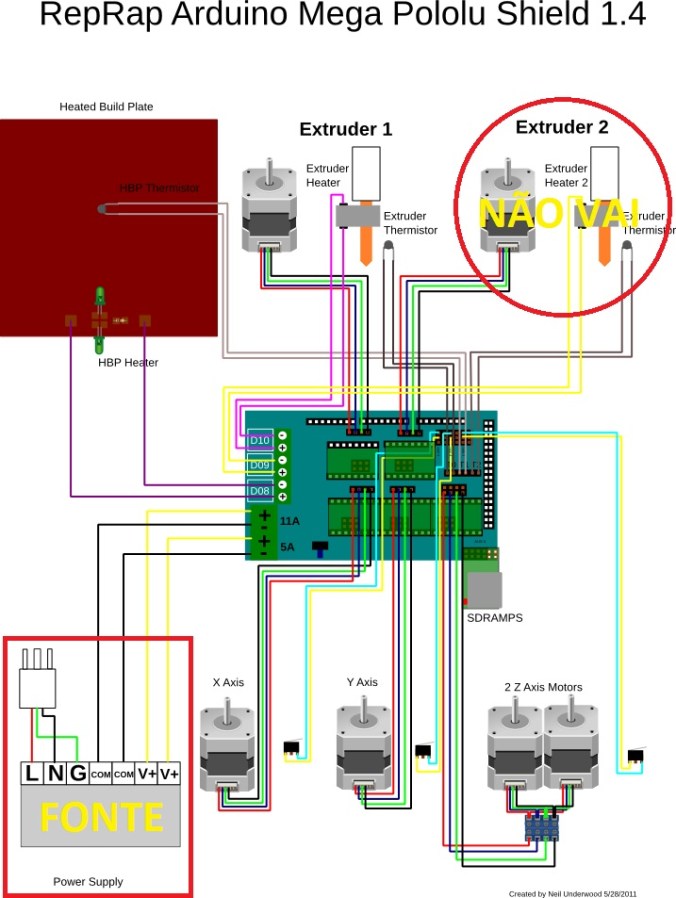
Segue o modelo das conexões da RAMPS
A pedido do professor Genaro decidimos pelo modelo na 3D


O professor Paulo sugeriu fazer o Topo na Corte a laser. Segue a peça que estou fabricando.
Corte do modelo na Corte a Laser

Não completei o corte pois a Corte a Laser estava desalinhada
O motor não foi encontrado até o momento.
Somente encontramos motores separados e diferentes.
Como é necessário que todos os motores sejam iguais, é impossível a utilização de todos.
Fui informado pelo Clube do Drone da Bahia que é possível encontrar em Feira de Santana. Como meu pai viaja para lá no próxima terça, peço para ele comprar.
Enquanto isso ficamos entre dois modelos do corpo do Drone.


Escolhemos o motor para mini drone para o projeto.
Infelizmente não encontramos pela cidade (Buscamos em lojas de venda de drone, autorizadas, Pelourinho e diversos chats). Decidimos comprar pela internet, mas o frete normal demora cerca de 24 dias, que está acima do tempo de entrega do projeto. E o frete expresso pede R$ 47,00, o que foge do nosso orçamento.
Professor Genaro sugeriu comprar pela OLX, entramos em contato com alguns vendedores. Ainda na espera de resposta.
Decidimos a não utilização dos motores encontrados
Em todo material encontrado os motores utilizados são motores de alta rotação, kv e estabilidade. Infelizmente não temos esse tipo de motor, vamos buscar na cidade.
Como percebemos que varias limitações estão aparecendo, buscamos material para saber qual tipo de motor precisamos usar.
Esse material define a constante mais importante:
Kv
